五部门关于开展2024年新能源汽车下乡活动的通知
Momenta的“无图”智能驾驶算法方案
来源:新能源汽车网
时间:2023-07-17 17:01:24
热度:
Momenta的“无图”智能驾驶算法方案高阶智能驾驶“重高精地图”的方案,由于高精地图信息审核管理等约束而无法快速迭代推向用户,同时也受智能驾驶硬件以及开发成本的压力,所以饱受诟病
高阶智能驾驶“重高精地图”的方案,由于高精地图信息审核管理等约束而无法快速迭代推向用户,同时也受智能驾驶硬件以及开发成本的压力,所以饱受诟病。
另外在当前大家都喊“卷”出海的背景下“重高精地图”的方案也是弊端多多,高精地图作为地区以及国家安全核心数据,是有严格的数据安全法规约束。“重高精地图”的方案,如果没有高精地图那么无法提供高阶智能驾驶,就无法在海外当地形成智能化的差异化;即使当地支持高精地图,但是各种适应性开发和适配也增加开发成本和时间进度,极大拉高了门槛。
最后在海外,如果没有高阶智能驾驶,面对特斯拉海外智能驾驶方案也是无还手之力,而且特斯拉的价格杀手让国内一众难以找到定位。如果这样,国内智能电动车出海,只有靠一张座舱智能化的牌外加靠国人内卷出来的便宜了。
所以,智能驾驶“无图方案”是智能驾驶的必走之路,应该让高精地图变成高阶智能驾驶的稳健以及安全冗余而不是前提,有高精地图更稳健和更安全,但不影响功能的日常使用。
当然不少主机厂都意识到了这个问题,小鹏,华为等已经推出无图智能驾驶,Momenta以及理想等也在暗暗发力即将推出上车,但是对于重单车智能轻高精地图方案背后的算法和架构大家却是思路不相同。
最近的CVPR 2023 自动驾驶研讨会 (WAD)上,智能驾驶供应商Momenta(如果有不熟悉momenta的,估计知道上汽的智己,智己已经量产其智能驾驶方案)简单的介绍了下其无图智能驾驶算法方案以及其算法路径图。

其智能驾驶三步骤以及其核心创新算法主要如下:
感知环境,主要依赖摄像头,摄像头基本上都是360周视覆盖。Momenta主要依赖其DDLD-Data Driven Landmark Detection 车道线识别算法来感知运动的边界。
定位位置,这里的定位主要是指车辆运动下的位置变化。Momenta主要依赖其DDPF-data driven pose fusion位置融合算法来计算定位车辆运动时候的位置。
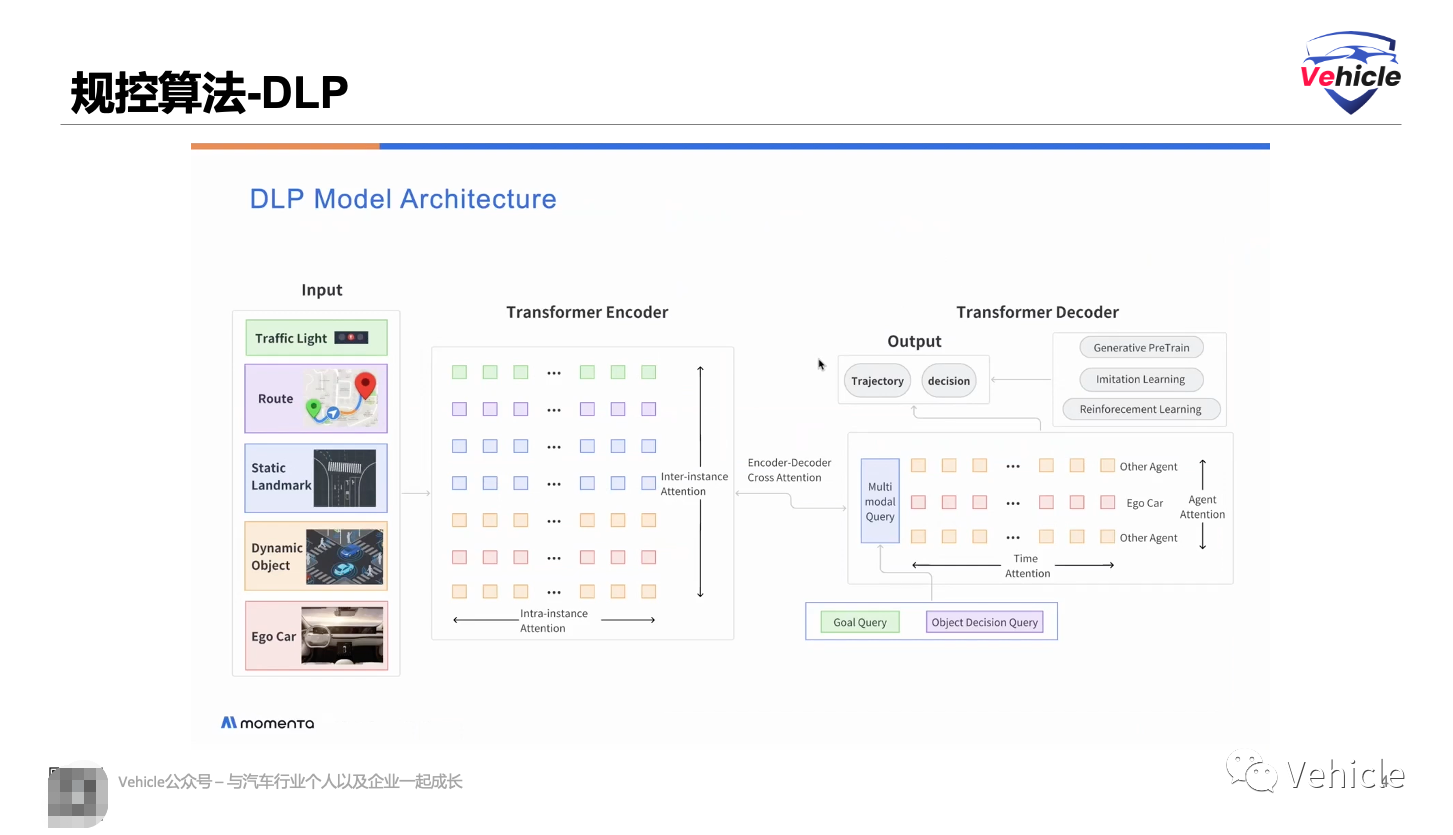
规控路径,基于导航,环境,车辆的运动位置去规划路径。Momenta主要Deep learning planning 深度学习算法来规控车辆驾驶。
当然智能驾驶算法不止以上,以上主要是点出Momenta的核心差异算法,下文Momenta数据驱动算法路线图会点出其他算法以及他们的发展方向。
一般基于高精地图的智能驾驶方案,车辆行驶主要是依赖高精地图给的精度为±20厘米的车道参考线行驶,但没有高精地图,那么就需要车辆自己能够确保在车道内行驶,所以需要车辆本身能够识别车道以及行驶的约束,所以Momenta算法发力的点是道路中的车道线等静态约束的识别和构建,类似于特斯拉BEV+Transformer,但Momenta这个方案更像是Mobileye的看家本领-车道线识别,另外地平线的方案也是在这方面有优势。
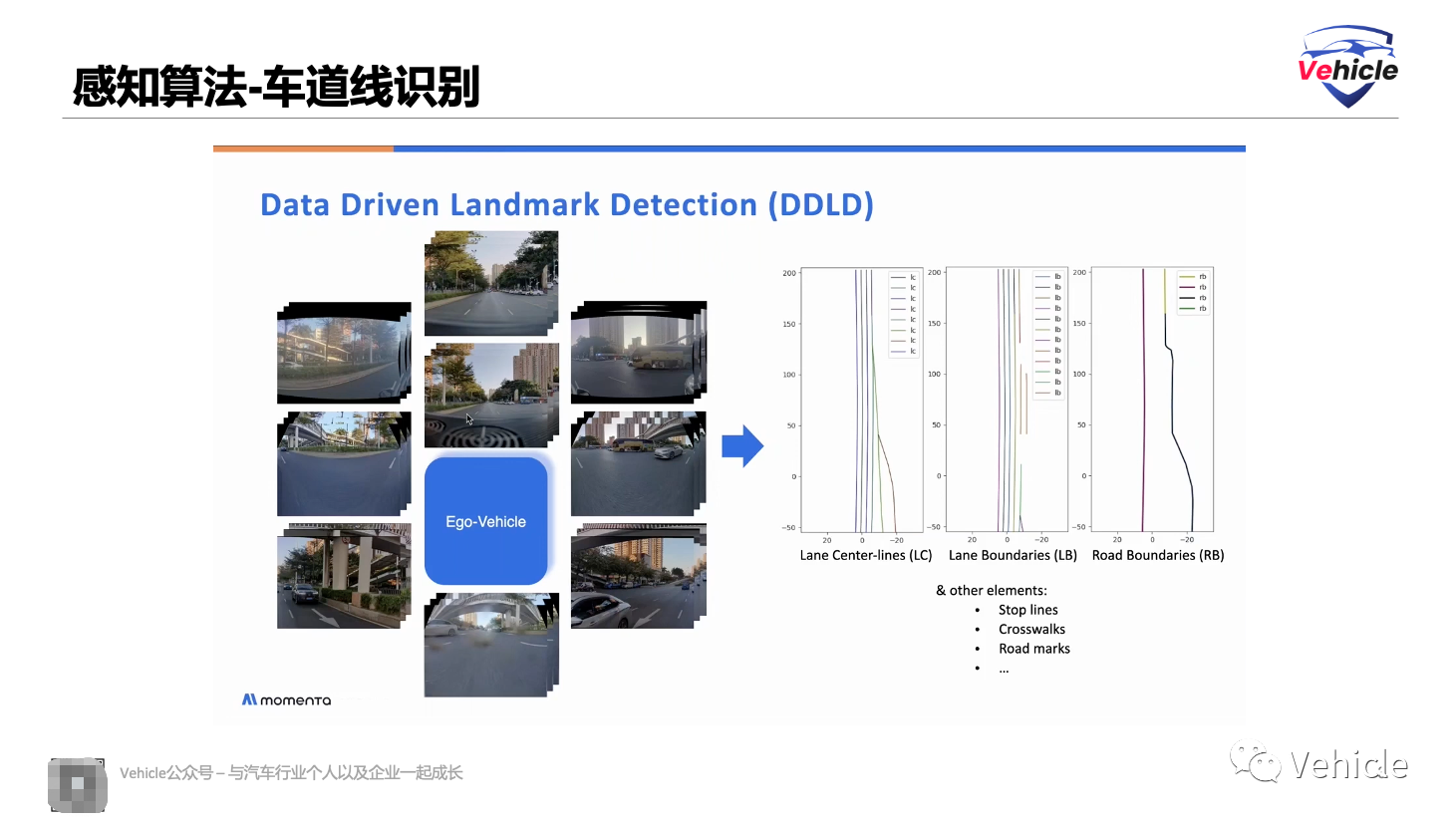
通过识别车道线以及道路标识构建车辆实时行驶地图,来告诉车辆行驶约束,但车辆是运动的,车辆的实时运动需要与实时行驶地图匹配和定位。Momenta通过采集车辆运动执行器以及姿态的传感器轮速传感器,转向角,IMU,电机转速等信息融合算法来实现车辆在实时地图中定位。

有了实时地图信息以及车辆本身运动信息那么再结合其他道路使用者信息,规控算法进行车辆行驶的路径规划,高阶智能驾驶得以实施。
以上为momenta"无图"智能驾驶算法的总体思想和核心算法。总体来讲是一个比较优化的迭代方案,当前智能驾驶算法发展最怕的就是推倒重来,也是这次智能驾驶洗牌发生最常见的事情,算法推倒重来,巨大的数据标注失效,需要再次按照新算法来数据标注,造成巨大的成本和时间损失。
Momenta的算法路径图也体现的是一个迭代的概念,基于传统识别,跟踪,预测,定位各个算法分开再融合的概念,这个算法本质上一直延续到2023年底,Momenta计划是2025年中旬走向新的融合算法。
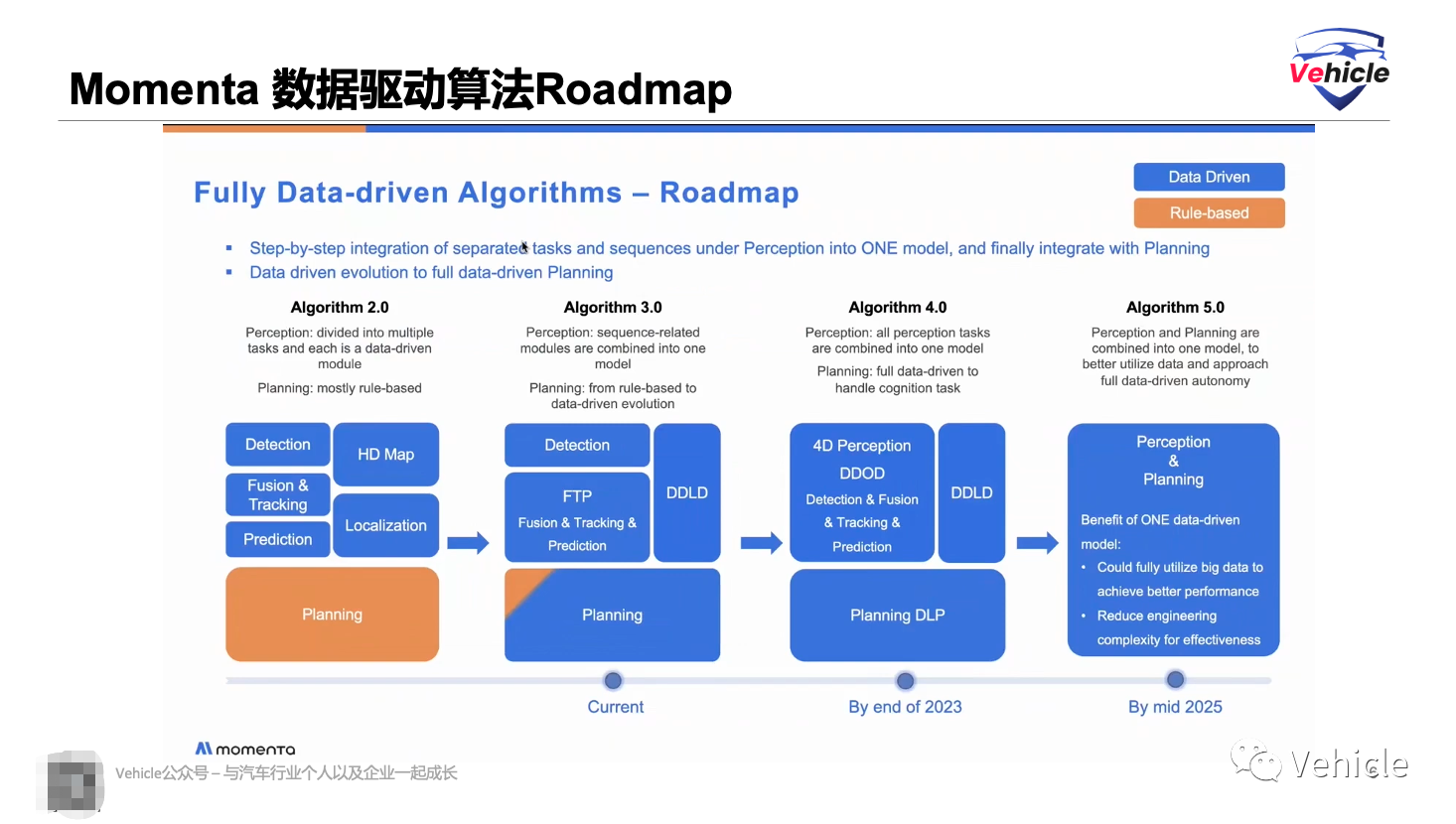
目前国内大部分基于高精地图的高阶智能驾驶领航辅助都是采用类似于上图momenta 算法2.0的方案,这种成熟方案可以在更少的AI算力和更简单的算法下,实施相对稳健安全的高阶智能驾驶,但是拓展性差,无法进行快速的场景和地区拓展。
而去图化的算法,有类似于Momenta识别静态道路环境,采取实时建图的方式,也有特斯拉用occupancy算法来圈定自动驾驶车辆环境中的动静态驾驶约束方式,当然Momenta方式更加轻量化和符合中国的算法迭代;但特斯拉的occupancy算法会更加一体化。
总的来说,无图是趋势!但无图不代表高精地图没有出路了,在科技世界里面都在寻求一个体验,价格的平衡,每个平衡点都有位置和市场。
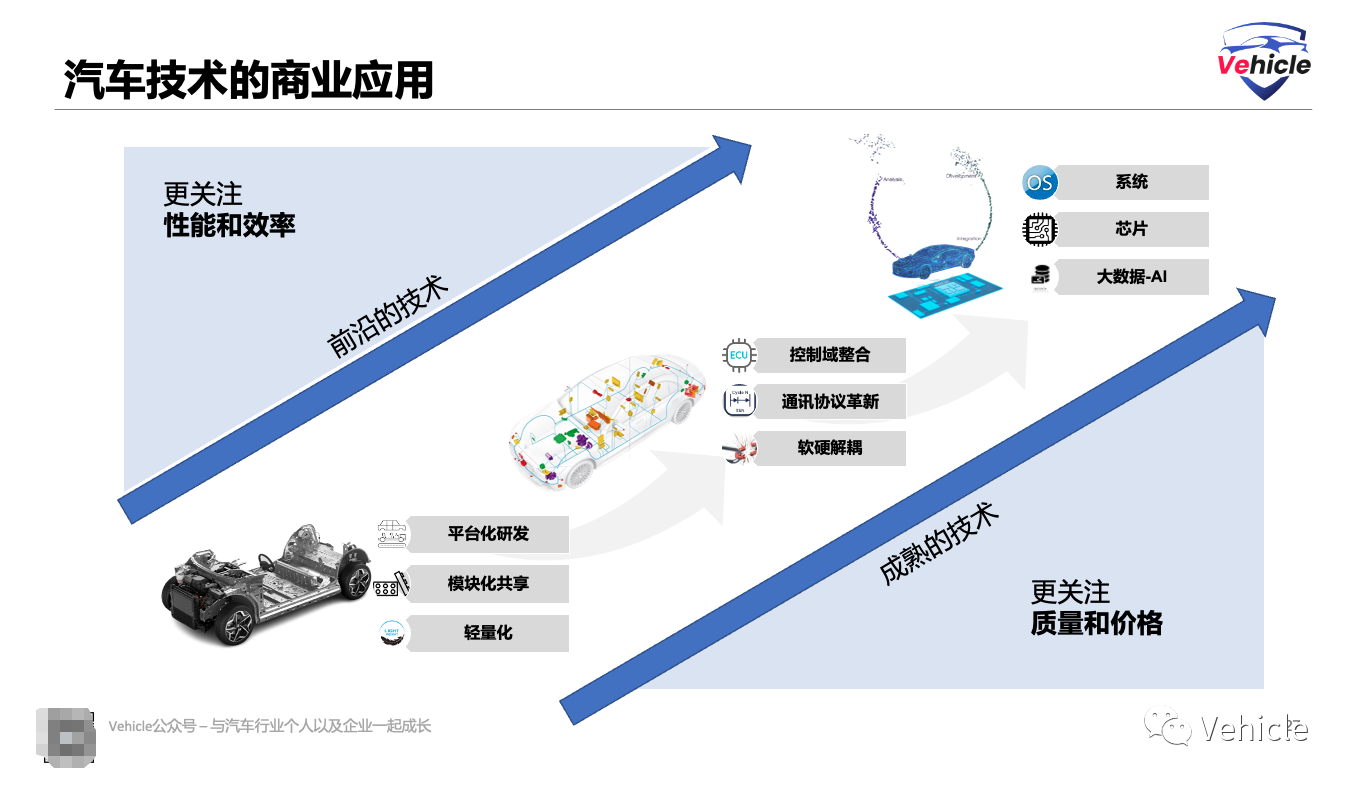
前沿的技术,更加关注性能和效率;成熟的技术更关注质量和价格。前沿技术吸引更多的爱好者发烧友;成熟的技术可以做好质量和价格让更多的大众使用。
所有,各方也不必过度担心,大家可以差异化竞争,而不是你死我活的内卷。
参考文章以及图片
1、CVPR 2023 WAD Keynote - Jiyang Gao, Momenta
*未经准许严禁转载和摘录
原文标题:Momenta的“无图”智能驾驶算法方案

-
新能源和智能化成汽车业“新风口”2023-11-30
-
甘肃省新能源汽车推广应用实施方案(2016—2020年)2023-11-30
-
河南新能源汽车补贴变局 新版补贴方案鼓励里程更长、能耗更低车型2023-11-30
-
新能源汽车动力终极方案走向燃料电池 上海坤艾新成果或推动行业飞跃发展2023-11-30
-
接触电容传感器算法2023-07-14
-
重庆:聚焦新能源汽车、智能网联汽车等领域,进一步做大汽车产业集群2023-07-13
-
AI芯片禁令下,本土智能驾驶承压能力全解析2023-07-13
-
黑芝麻智能巨亏数十亿:大客户依赖症显著,自动驾驶盈利何时到?2023-07-12
-
上海人工智能大会落幕,智驾领域有何新进展?2023-07-10
-
从2023世界人工智能大会,看自动驾驶行业的新希望2023-07-10
-
DGM1004 MEMS开关 适用于低频和高频应用的高性能解决方案2023-07-06
-
抛弃高精地图、追逐通勤模式,车企们点燃城市NOA前哨战2023-07-06
-
中国第2000万辆新能源汽车在瑞松科技提供的智能柔性产线下线2023-07-05
-
Excelpoint - 双碳背景下 江南娱乐app下载地址 新变化2023-07-05
-
Vicor - 业界首创系留无人机高空应急通信方案为抢险救灾提供保障2023-07-05